


─┐Ū░╩ą├µ╔ŽĄ─ęÄ(gu©®)äØ╩ĮÆ▀ĄžÖC(j©®)Ų„╚╦▓╔ė├Ą─Č©╬╗ĘĮ╩ĮėąRPS╝ż╣Ō└ū▀_(d©ó)ī¦(d©Żo)║ĮČ©╬╗ŽĄĮy(t©»ng)ĪóvSLAMłDŽ±╬╗ęŲČ©╬╗ŽĄĮy(t©»ng)║═¤oŠĆ▌d▓©╩ęā╚(n©©i)Č©╬╗ŽĄĮy(t©»ng)ĪŻ
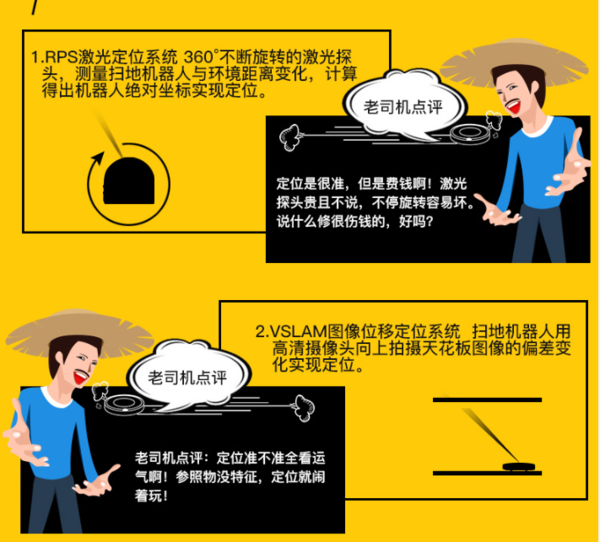
RPS╝ż╣ŌČ©╬╗ŽĄĮy(t©»ng)═©▀^360Č╚ą²▐D(zhu©Żn)╝ż╣Ō╠ĮŅ^Ż¼£y(c©©)┴┐┼cŁh(hu©ón)Š│ŠÓļxūā╗»Č©╬╗ū°ś╦(bi©Īo)Ż¼Æ▀├ĶĘ┐ķg╔·│╔3DĄžłDŻ¼Ė∙ō■(j©┤)ĄžłDī¦(d©Żo)║Į▀xō±Ė▀ą¦┬╩┬ĘŠĆŪÕÆ▀ĪŻ╝ż╣ŌČ©╬╗ŽĄĮy(t©»ng)┐╔ęį╩╣Æ▀ĄžÖC(j©®)Ų„╚╦▀_(d©ó)ĄĮ▓╗Õe(cu©░)Ą─ŪÕÆ▀ą¦╣¹Ż¼Ą½ÖC(j©®)Ų„╚╦┼õéõĄ─╝ż╣Ō╠ĮŅ^ę╗ų▒ą²▐D(zhu©Żn)╠Į£y(c©©)Ż¼Ģ■(hu©¼)ī¦(d©Żo)ų┬ē█├³┐sČ╠ĪŻ╚ńneatoĪó┐Ų╬ų╦╣▀ĆėąąĪ├ūŻ╗
vSLAMłDŽ±╬╗ęŲČ©╬╗ŽĄĮy(t©»ng)═©▀^ā╚(n©©i)ų├özŽ±Ņ^┼─öz╠ņ╗©░ÕŻ¼į┌╠ņ╗©░Õ╔Žīżšę╚²éĆ(g©©)╬’¾w×ķģóšš╬’Ą─ĘĮ╩ĮüĒ▒ŻūCÖC(j©®)Ų„ąąū▀┬ĘŠĆ▓╗Ų½ļxŻ¼Ą½╩Ūę╗░Ń╝ę═źĄ─╠ņ╗©░Õ═∙═∙▒╚▌^║å(ji©Żn)å╬Ż¼▓óø]ėąūŃē“ČÓ┐╔ė├ū„ģ󚚥─³c(di©Żn)Ż¼ī¦(d©Żo)ų┬īŹ(sh©¬)ļHČ©╬╗ą¦╣¹▓╗╚ń╚╦ęŌŻ¼ŪÕÆ▀ą¦╣¹ę▓▓ŅÅŖ(qi©óng)╚╦ęŌĪŻ╚ńiRobotĪó╚²ąŪĪó┤„╔ŁŻ╗
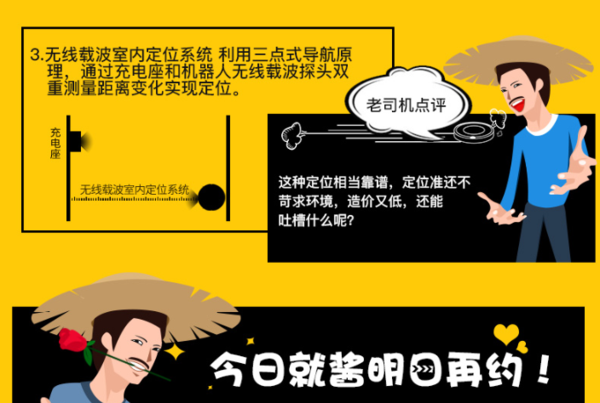
¤oŠĆ▌d▓©╩ęā╚(n©©i)Č©╬╗ŽĄĮy(t©»ng)═©▀^│õļŖū∙║═ÖC(j©®)Ų„¤oŠĆ▌d▓©╠ĮŅ^ļpųž£y(c©©)┴┐ŠÓļxūā╗»Č©╬╗ū°ś╦(bi©Īo)ĪŻ«ö(d©Īng)Æ▀ĄžÖC(j©®)Ų„╚╦Įė╩šĄĮČ©╬╗ą┼╠¢(h©żo)║¾Ż¼░l(f©Ī)╔õ╝t═ŌŠÄ┤aųĖ┴ŅŻ¼═¼Ģr(sh©¬)ėŗ(j©¼)Ģr(sh©¬)Ų„ķ_╩╝ėŗ(j©¼)Ģr(sh©¬)Ż¼«ö(d©Īng)│õļŖū∙Įė╩šĄĮ╝t═ŌŠÄ┤aųĖ┴Ņ║¾ī”(du©¼)Ųõ▀M(j©¼n)ąąĮŌ┤aŻ¼▓óĖ∙ō■(j©┤)ĮŌ┤aĮY(ji©”)╣¹øQČ©╩Ūʱ░l(f©Ī)╔õą┼╠¢(h©żo)Ż╗Æ▀ĄžÖC(j©®)Ų„╚╦Įė╩šĄĮą┼╠¢(h©żo)║¾═Żų╣ėŗ(j©¼)Ģr(sh©¬)Ż¼ėŗ(j©¼)╦Ń│÷įō╝t═ŌŠÄ┤aųĖ┴Ņī”(du©¼)æ¬(y©®ng)Ą─╣╠Č©³c(di©Żn)ĄĮįō³c(di©Żn)Ą─ŠÓļxŻ¼Å─Č°╩╣Æ▀ĄžÖC(j©®)Ų„╚╦┐╔ęįėøæø╩ęā╚(n©©i)Č©╬╗ū°ś╦(bi©Īo)Ż¼ėąČ©╬╗ėąėøæøŻ¼▓┼─▄ū÷ĄĮšµ£y(c©©)łDĪŻ╚ńProscenicŻ©Ųų╔Ż─ß┐╦Ż®ĪóiRobotĪŻ
═©▀^╔Ž╩÷Ęų╬÷╬ęéā┴╦ĮŌĄĮŻ¼ŽÓī”(du©¼)ė┌é„Įy(t©»ng)Ą─ļSÖC(j©®)╩ĮÆ▀ĄžÖC(j©®)Ų„╚╦üĒšfŻ¼ęÄ(gu©®)äØ╩ĮÆ▀ĄžÖC(j©®)į┌Ė„ĘĮ├µČ╝Ė³ėąā×(y©Łu)ä▌(sh©¼)Ż¼╠žäe╩Ūį┌ųŪ─▄│╠Č╚ĘĮ├µŻ¼«ö(d©Īng)╚╗╩ŪėąČ©╬╗Ą─ęÄ(gu©®)äØ╩ĮÆ▀ĄžÖC(j©®)Ų„╚╦Ė³ä┘ę╗╗IŻ¼Č°▓╗═¼ŲĘ┼ŲĄ─Æ▀ĄžÖC(j©®)▓╔ė├Ą─Č©╬╗ĘĮ╩ĮėųĖ„ėą▓╗═¼Ż¼ī¦(d©Żo)ų┬║▄ČÓ╚╦ĘĖ┴╦▀xō±└¦ļy░YŻ¼╦∙ęį▒ŠŲ¬╬─š┬ąĪŠÄ─┐Ū░╚²┤¾Č©╬╗ĘĮ╩Į▀M(j©¼n)ąą┴╦įö╝Ü(x©¼)Ą─Ęų╬÷Ż¼Įø(j©®ng)▀^╚²ĘNČ©╬╗ĘĮ╩ĮĄ─ī”(du©¼)▒╚╬ęéā▓╗ļy┐┤│÷Ż¼¤oŠĆ▌d▓©╩ęā╚(n©©i)Č©╬╗ŽĄĮy(t©»ng)Ą─Ė„ĘĮ├µā×(y©Łu)ä▌(sh©¼)╩Ū╩«Ęų├„’@Ą─Ż¼ō■(j©┤)┴╦ĮŌŻ¼─┐Ū░┤╦ĘNČ©╬╗ĘĮ╩Įį┌Ųų╔Ż─ß┐╦Æ▀ĄžÖC(j©®)Ų„╚╦ųąæ¬(y©®ng)ė├ūŅ×ķÅVĘ║ĪŻ